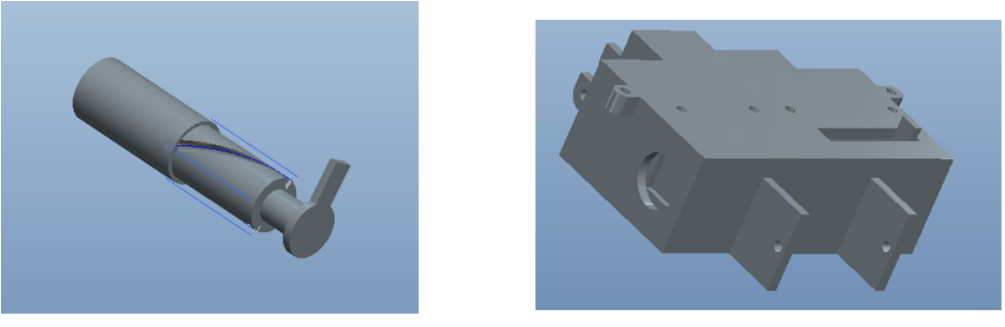
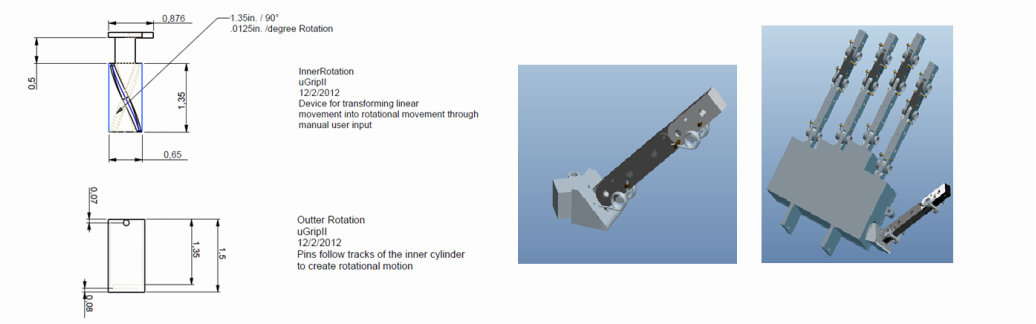
The thumb mechanism is responsible for transmitting linear motion into rotational motion. This is done via the inner cylinder shown below which has tracks that can be fitted with the pins of the outter cylinder. The user can push to rotate the outer cylinder, upon which the thumb will be mounted.
The rotation mechanism will be placed in the palm casing, where the user can access inner cylinder handle from the back of the prosthetic hand.
The rotation mechanism will be placed in the palm casing, where the user can access inner cylinder handle from the back of the prosthetic hand.