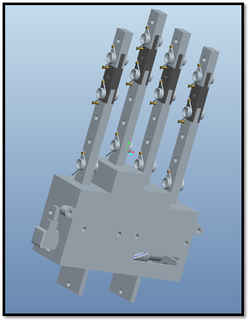
This is the design of the palm and fingers for the PNEU-Grip. The fingers consist of three segments (two joints) that will have string running along them for actuation by the pneumatic artificial muscles. The fingers are 3.75 inches in length and will provide for adequate gripping capabilities. The fingers will be attached via pins to bases that will be connected to the palm.
The palm was designed to house the thumb mechanism as well as connect to the wrist mechanism that was designed. The palm is 2.6 inches long. The cover plate is removable for testing protocols. There is a channel in the cover plate in which the thumb mechanism will move to control thumb positioning.
The palm was designed to house the thumb mechanism as well as connect to the wrist mechanism that was designed. The palm is 2.6 inches long. The cover plate is removable for testing protocols. There is a channel in the cover plate in which the thumb mechanism will move to control thumb positioning.
