Actuation System
The device will utilize five distinct shoulder movements to control a pneumatic actuation system. The system will consist of 4 solenoid valves and one mechanical safety valve. A 5-port, 2-way valve will simulate agonist/antagonist muscle contraction through Pneumatic Artificial Muscles to control wrist flexion. An identical valve will be used in a similar fashion to activate rotational motion through a pneumatic rotary actuator.
A 5-port, 3-way valve equipped with two solenoids and a 3-port, 2-way valve will work in concert to control two types of grips: a pinch grip and a conforming grip. For the pinch grip, the index finger and thumb will be brought together to allow for fine control when grasping small objects. For the conforming grip, all four fingers will be contracted simultaneously using pneumatic artificial muscles. However, each finger is attached to its own muscle, so force distribution within the grip will lead to differential contraction.
The valves will be controlled through a novel signal transduction system that utilizes five distinct shoulder articulations to control the device (Figure 1). Using pull switches, attached to a modified harness, the user will be able to control the device with minimal discomfort. Each movement will control a solenoid in the actuation system.
A 5-port, 3-way valve equipped with two solenoids and a 3-port, 2-way valve will work in concert to control two types of grips: a pinch grip and a conforming grip. For the pinch grip, the index finger and thumb will be brought together to allow for fine control when grasping small objects. For the conforming grip, all four fingers will be contracted simultaneously using pneumatic artificial muscles. However, each finger is attached to its own muscle, so force distribution within the grip will lead to differential contraction.
The valves will be controlled through a novel signal transduction system that utilizes five distinct shoulder articulations to control the device (Figure 1). Using pull switches, attached to a modified harness, the user will be able to control the device with minimal discomfort. Each movement will control a solenoid in the actuation system.
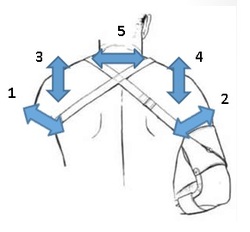
Figure 1- Shoulder articulations used for control of a pneumatically actuated hand
